







ਖੱਬੇ-ਹੱਥ ਨਿਯਮ, ਸੱਜੇ-ਹੱਥ ਨਿਯਮ, ਸੱਜੇ-ਹੱਥ ਪੇਚ ਨਿਯਮ.ਖੱਬੇ ਹੱਥ ਦਾ ਨਿਯਮ, ਇਹ ਮੋਟਰ ਰੋਟੇਸ਼ਨ ਦੇ ਬਲ ਦੇ ਵਿਸ਼ਲੇਸ਼ਣ ਦਾ ਆਧਾਰ ਹੈ।ਸਧਾਰਨ ਰੂਪ ਵਿੱਚ, ਇਹ ਚੁੰਬਕੀ ਖੇਤਰ ਵਿੱਚ ਮੌਜੂਦਾ-ਲੈਣ ਵਾਲਾ ਕੰਡਕਟਰ ਹੈ, ਜੋ ਬਲ ਦੁਆਰਾ ਪ੍ਰਭਾਵਿਤ ਹੋਵੇਗਾ।
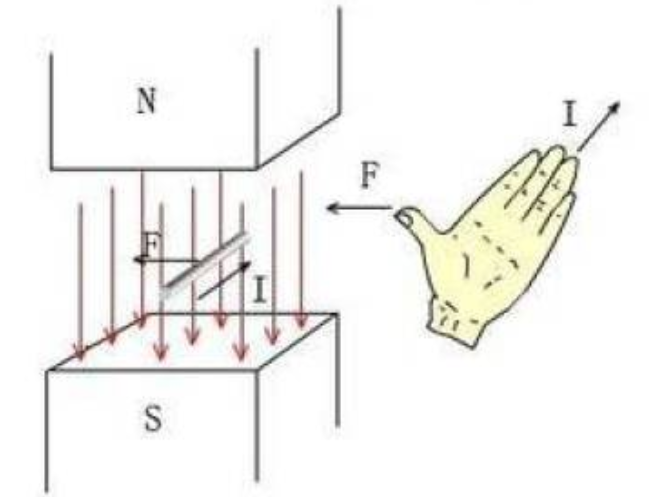
ਚੁੰਬਕੀ ਖੇਤਰ ਰੇਖਾ ਨੂੰ ਹਥੇਲੀ ਦੇ ਅਗਲੇ ਹਿੱਸੇ ਵਿੱਚੋਂ ਲੰਘਣ ਦਿਓ, ਉਂਗਲਾਂ ਦੀ ਦਿਸ਼ਾ ਕਰੰਟ ਦੀ ਦਿਸ਼ਾ ਹੈ, ਅਤੇ ਅੰਗੂਠੇ ਦੀ ਦਿਸ਼ਾ ਚੁੰਬਕੀ ਬਲ ਦੀ ਦਿਸ਼ਾ ਹੈ।ਬਲ ਦਾ ਟ੍ਰੈਕਸ਼ਨ ਇਲੈਕਟ੍ਰੋਮੋਟਿਵ ਬਲ ਪੈਦਾ ਕਰਨ ਲਈ ਚੁੰਬਕੀ ਖੇਤਰ ਦੀਆਂ ਲਾਈਨਾਂ ਨੂੰ ਕੱਟਦਾ ਹੈ।
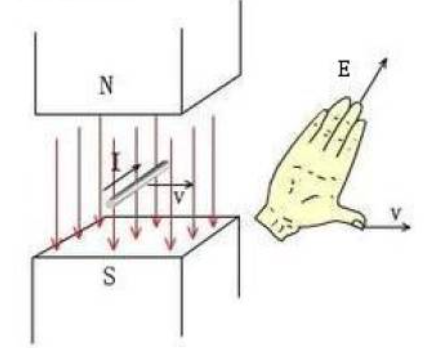
ਚੁੰਬਕੀ ਖੇਤਰ ਰੇਖਾ ਨੂੰ ਹਥੇਲੀ ਵਿੱਚੋਂ ਲੰਘਣ ਦਿਓ, ਅੰਗੂਠੇ ਦੀ ਦਿਸ਼ਾ ਗਤੀ ਦੀ ਦਿਸ਼ਾ ਹੈ, ਅਤੇ ਉਂਗਲੀ ਦੀ ਦਿਸ਼ਾ ਉਤਪੰਨ ਇਲੈਕਟ੍ਰੋਮੋਟਿਵ ਫੋਰਸ ਦੀ ਦਿਸ਼ਾ ਹੈ।ਇੰਡਿਊਸਡ ਇਲੈਕਟ੍ਰੋਮੋਟਿਵ ਫੋਰਸ ਬਾਰੇ ਗੱਲ ਕਿਉਂ ਕਰੀਏ?ਮੈਨੂੰ ਨਹੀਂ ਪਤਾ ਕਿ ਤੁਹਾਡੇ ਕੋਲ ਕੋਈ ਸਮਾਨ ਅਨੁਭਵ ਹੈ ਜਾਂ ਨਹੀਂ।ਜਦੋਂ ਤੁਸੀਂ ਮੋਟਰ ਦੀਆਂ ਥ੍ਰੀ-ਫੇਜ਼ ਤਾਰਾਂ ਨੂੰ ਜੋੜਦੇ ਹੋ ਅਤੇ ਮੋਟਰ ਨੂੰ ਹੱਥ ਨਾਲ ਮੋੜਦੇ ਹੋ, ਤਾਂ ਤੁਸੀਂ ਦੇਖੋਗੇ ਕਿ ਵਿਰੋਧ ਬਹੁਤ ਵੱਡਾ ਹੈ।ਇਹ ਇਸ ਲਈ ਹੈ ਕਿਉਂਕਿ ਇੰਡਕਸ਼ਨ ਮੋਟਰ ਦੇ ਰੋਟੇਸ਼ਨ ਦੌਰਾਨ ਹੁੰਦਾ ਹੈ.ਇਲੈਕਟ੍ਰੋਮੋਟਿਵ ਬਲ ਕਰੰਟ ਪੈਦਾ ਕਰਦਾ ਹੈ, ਅਤੇ ਚੁੰਬਕੀ ਖੇਤਰ ਵਿੱਚ ਕੰਡਕਟਰ ਦੁਆਰਾ ਵਹਿੰਦਾ ਕਰੰਟ ਰੋਟੇਸ਼ਨ ਦੀ ਦਿਸ਼ਾ ਦੇ ਉਲਟ ਇੱਕ ਬਲ ਪੈਦਾ ਕਰੇਗਾ, ਅਤੇ ਹਰ ਕੋਈ ਮਹਿਸੂਸ ਕਰੇਗਾ ਕਿ ਰੋਟੇਸ਼ਨ ਲਈ ਬਹੁਤ ਜ਼ਿਆਦਾ ਵਿਰੋਧ ਹੈ।
ਤਿੰਨ-ਪੜਾਅ ਦੀਆਂ ਤਾਰਾਂ ਨੂੰ ਵੱਖ ਕੀਤਾ ਗਿਆ ਹੈ ਅਤੇ ਮੋਟਰ ਨੂੰ ਆਸਾਨੀ ਨਾਲ ਮੋੜਿਆ ਜਾ ਸਕਦਾ ਹੈ
ਤਿੰਨ-ਪੜਾਅ ਦੀਆਂ ਲਾਈਨਾਂ ਜੋੜੀਆਂ ਗਈਆਂ ਹਨ, ਅਤੇ ਮੋਟਰ ਦਾ ਵਿਰੋਧ ਬਹੁਤ ਵੱਡਾ ਹੈ.ਸੱਜੇ-ਹੱਥ ਦੇ ਪੇਚ ਦੇ ਨਿਯਮ ਦੇ ਅਨੁਸਾਰ, ਸੱਜੇ ਹੱਥ ਨਾਲ ਐਨਰਜੀਡ ਸੋਲਨੋਇਡ ਨੂੰ ਫੜੋ, ਤਾਂ ਕਿ ਚਾਰ ਉਂਗਲਾਂ ਉਸੇ ਦਿਸ਼ਾ ਵਿੱਚ ਝੁਕੀਆਂ ਹੋਣ ਜਿਵੇਂ ਕਿ ਕਰੰਟ, ਫਿਰ ਅੰਗੂਠੇ ਦੁਆਰਾ ਇਸ਼ਾਰਾ ਕੀਤਾ ਗਿਆ ਸਿਰਾ ਐਨਰਜੀਡ ਸੋਲਨੋਇਡ ਦਾ ਐਨ ਪੋਲ ਹੈ।
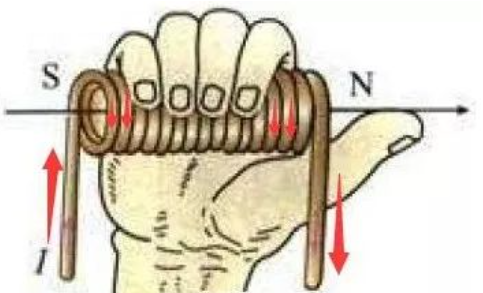
ਇਹ ਨਿਯਮ ਊਰਜਾਵਾਨ ਕੋਇਲ ਦੀ ਪੋਲਰਿਟੀ ਦਾ ਨਿਰਣਾ ਕਰਨ ਦਾ ਆਧਾਰ ਹੈ, ਅਤੇ ਲਾਲ ਤੀਰ ਦੀ ਦਿਸ਼ਾ ਮੌਜੂਦਾ ਦਿਸ਼ਾ ਹੈ।ਤਿੰਨ ਨਿਯਮਾਂ ਨੂੰ ਪੜ੍ਹਨ ਤੋਂ ਬਾਅਦ, ਆਓ ਮੋਟਰ ਰੋਟੇਸ਼ਨ ਦੇ ਮੂਲ ਸਿਧਾਂਤਾਂ 'ਤੇ ਇੱਕ ਨਜ਼ਰ ਮਾਰੀਏ।ਪਹਿਲਾ ਭਾਗ: DC ਮੋਟਰ ਮਾਡਲ ਅਸੀਂ ਇੱਕ DC ਮੋਟਰ ਦਾ ਇੱਕ ਮਾਡਲ ਲੱਭਦੇ ਹਾਂ ਜਿਸਦਾ ਅਧਿਐਨ ਹਾਈ ਸਕੂਲ ਭੌਤਿਕ ਵਿਗਿਆਨ ਵਿੱਚ ਕੀਤਾ ਗਿਆ ਹੈ, ਅਤੇ ਚੁੰਬਕੀ ਸਰਕਟ ਵਿਸ਼ਲੇਸ਼ਣ ਵਿਧੀ ਦੁਆਰਾ ਇੱਕ ਸਧਾਰਨ ਵਿਸ਼ਲੇਸ਼ਣ ਕਰਦੇ ਹਾਂ।
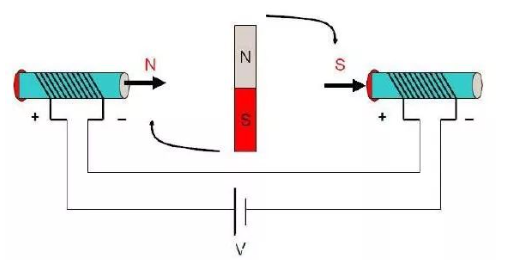
ਸਥਿਤੀ 1 ਜਦੋਂ ਕਰੰਟ ਨੂੰ ਦੋਹਾਂ ਸਿਰਿਆਂ 'ਤੇ ਕੋਇਲਾਂ 'ਤੇ ਲਾਗੂ ਕੀਤਾ ਜਾਂਦਾ ਹੈ, ਸੱਜੇ-ਹੱਥ ਦੇ ਪੇਚ ਨਿਯਮ ਦੇ ਅਨੁਸਾਰ, ਇੱਕ ਲਾਗੂ ਚੁੰਬਕੀ ਇੰਡਕਸ਼ਨ ਤੀਬਰਤਾ B (ਜਿਵੇਂ ਕਿ ਮੋਟੇ ਤੀਰ ਦੁਆਰਾ ਦਿਖਾਇਆ ਗਿਆ ਹੈ) ਤਿਆਰ ਕੀਤਾ ਜਾਵੇਗਾ, ਅਤੇ ਮੱਧ ਵਿੱਚ ਰੋਟਰ ਬਣਾਉਣ ਦੀ ਕੋਸ਼ਿਸ਼ ਕਰੇਗਾ। ਜਿੱਥੋਂ ਤੱਕ ਸੰਭਵ ਹੋ ਸਕੇ ਇਸਦੀ ਅੰਦਰੂਨੀ ਚੁੰਬਕੀ ਇੰਡਕਸ਼ਨ ਲਾਈਨ ਦੀ ਦਿਸ਼ਾ।ਬਾਹਰੀ ਚੁੰਬਕੀ ਫੀਲਡ ਲਾਈਨ ਦੀ ਦਿਸ਼ਾ ਇੱਕ ਛੋਟੀ ਬੰਦ ਚੁੰਬਕੀ ਫੀਲਡ ਲਾਈਨ ਲੂਪ ਬਣਾਉਣ ਲਈ ਇਕਸਾਰ ਹੁੰਦੀ ਹੈ, ਤਾਂ ਜੋ ਅੰਦਰੂਨੀ ਰੋਟਰ ਘੜੀ ਦੀ ਦਿਸ਼ਾ ਵਿੱਚ ਘੁੰਮੇ।ਜਦੋਂ ਰੋਟਰ ਚੁੰਬਕੀ ਖੇਤਰ ਦੀ ਦਿਸ਼ਾ ਬਾਹਰੀ ਚੁੰਬਕੀ ਖੇਤਰ ਦੀ ਦਿਸ਼ਾ ਦੇ ਪ੍ਰਤੀ ਲੰਬਵਤ ਹੁੰਦੀ ਹੈ, ਤਾਂ ਰੋਟਰ ਦਾ ਰੋਟੇਸ਼ਨਲ ਟਾਰਕ ਸਭ ਤੋਂ ਵੱਡਾ ਹੁੰਦਾ ਹੈ।ਨੋਟ ਕਰੋ ਕਿ "ਪਲ" ਨੂੰ ਸਭ ਤੋਂ ਵੱਡਾ ਕਿਹਾ ਜਾਂਦਾ ਹੈ, ਨਾ ਕਿ "ਬਲ"।ਇਹ ਸੱਚ ਹੈ ਕਿ ਜਦੋਂ ਰੋਟਰ ਚੁੰਬਕੀ ਖੇਤਰ ਬਾਹਰੀ ਚੁੰਬਕੀ ਖੇਤਰ ਦੀ ਦਿਸ਼ਾ ਵਿੱਚ ਹੁੰਦਾ ਹੈ, ਤਾਂ ਰੋਟਰ ਉੱਤੇ ਚੁੰਬਕੀ ਬਲ ਸਭ ਤੋਂ ਵੱਡਾ ਹੁੰਦਾ ਹੈ, ਪਰ ਇਸ ਸਮੇਂ ਰੋਟਰ ਇੱਕ ਲੇਟਵੀਂ ਸਥਿਤੀ ਵਿੱਚ ਹੁੰਦਾ ਹੈ ਅਤੇ ਬਲ ਬਾਂਹ 0 ਹੁੰਦੀ ਹੈ, ਅਤੇ ਕੋਰਸ ਇਸ ਨੂੰ ਘੁੰਮਾਉਣ ਨਹੀ ਕਰੇਗਾ.ਜੋੜਨ ਲਈ, ਪਲ ਬਲ ਅਤੇ ਬਲ ਬਾਂਹ ਦਾ ਉਤਪਾਦ ਹੈ।ਜੇਕਰ ਉਹਨਾਂ ਵਿੱਚੋਂ ਇੱਕ ਜ਼ੀਰੋ ਹੈ, ਤਾਂ ਉਤਪਾਦ ਜ਼ੀਰੋ ਹੈ।ਜਦੋਂ ਰੋਟਰ ਲੇਟਵੀਂ ਸਥਿਤੀ ਵੱਲ ਮੁੜਦਾ ਹੈ, ਹਾਲਾਂਕਿ ਇਹ ਹੁਣ ਰੋਟੇਸ਼ਨਲ ਟਾਰਕ ਦੁਆਰਾ ਪ੍ਰਭਾਵਿਤ ਨਹੀਂ ਹੁੰਦਾ, ਇਹ ਜੜਤਾ ਦੇ ਕਾਰਨ ਘੜੀ ਦੀ ਦਿਸ਼ਾ ਵਿੱਚ ਘੁੰਮਣਾ ਜਾਰੀ ਰੱਖੇਗਾ।ਇਸ ਸਮੇਂ, ਜੇਕਰ ਦੋ ਸੋਲਨੋਇਡਜ਼ ਦੀ ਮੌਜੂਦਾ ਦਿਸ਼ਾ ਬਦਲ ਦਿੱਤੀ ਜਾਂਦੀ ਹੈ, ਜਿਵੇਂ ਕਿ ਹੇਠਾਂ ਚਿੱਤਰ ਵਿੱਚ ਦਿਖਾਇਆ ਗਿਆ ਹੈ, ਰੋਟਰ ਘੁੰਮਣਾ ਜਾਰੀ ਰੱਖੇਗਾ।ਘੜੀ ਦੀ ਦਿਸ਼ਾ ਵਿੱਚ ਅੱਗੇ ਮੋੜੋ,
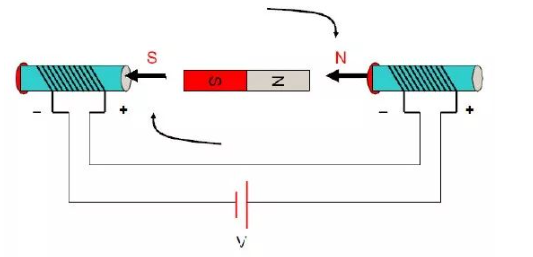
ਸਟੇਟ 2 ਵਿੱਚ, ਦੋ ਸੋਲਨੋਇਡਜ਼ ਦੀ ਮੌਜੂਦਾ ਦਿਸ਼ਾ ਲਗਾਤਾਰ ਬਦਲੀ ਜਾਂਦੀ ਹੈ, ਅਤੇ ਅੰਦਰਲਾ ਰੋਟਰ ਘੁੰਮਣਾ ਜਾਰੀ ਰੱਖੇਗਾ।ਕਰੰਟ ਦੀ ਦਿਸ਼ਾ ਬਦਲਣ ਦੀ ਇਸ ਕਿਰਿਆ ਨੂੰ ਕਮਿਊਟੇਸ਼ਨ ਕਿਹਾ ਜਾਂਦਾ ਹੈ।ਇੱਕ ਸਾਈਡ ਨੋਟ: ਕਦੋਂ ਕਮਿਊਟ ਕਰਨਾ ਹੈ ਸਿਰਫ ਰੋਟਰ ਦੀ ਸਥਿਤੀ ਨਾਲ ਸਬੰਧਤ ਹੈ ਅਤੇ ਸਿੱਧੇ ਤੌਰ 'ਤੇ ਕਿਸੇ ਹੋਰ ਮਾਤਰਾ ਨਾਲ ਸਬੰਧਤ ਨਹੀਂ ਹੈ।ਭਾਗ 2: ਥ੍ਰੀ-ਫੇਜ਼ ਟੂ-ਪੋਲ ਇਨਰ ਰੋਟਰ ਮੋਟਰ ਆਮ ਤੌਰ 'ਤੇ, ਸਟੇਟਰ ਦੇ ਤਿੰਨ-ਫੇਜ਼ ਵਿੰਡਿੰਗਜ਼ ਵਿੱਚ ਸਟਾਰ ਕਨੈਕਸ਼ਨ ਮੋਡ ਅਤੇ ਡੈਲਟਾ ਕਨੈਕਸ਼ਨ ਮੋਡ ਹੁੰਦਾ ਹੈ, ਅਤੇ "ਥ੍ਰੀ-ਫੇਜ਼ ਸਟਾਰ ਕਨੈਕਸ਼ਨ ਦਾ ਦੋ-ਦੋ ਕੰਡਕਸ਼ਨ ਮੋਡ" ਸਭ ਤੋਂ ਆਮ ਹੁੰਦਾ ਹੈ। ਵਰਤਿਆ ਹੈ, ਜੋ ਕਿ ਇੱਥੇ ਵਰਤਿਆ ਗਿਆ ਹੈ.ਇਹ ਮਾਡਲ ਇੱਕ ਸਧਾਰਨ ਵਿਸ਼ਲੇਸ਼ਣ ਲਈ ਵਰਤਿਆ ਗਿਆ ਹੈ.
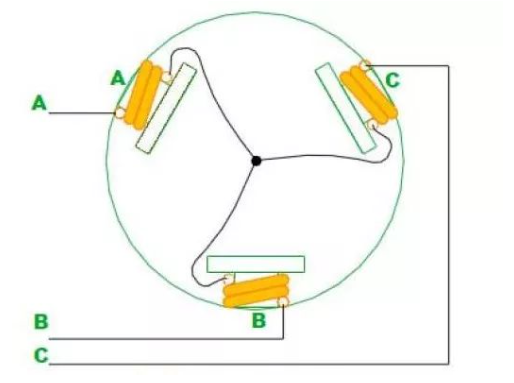
ਉਪਰੋਕਤ ਚਿੱਤਰ ਦਿਖਾਉਂਦਾ ਹੈ ਕਿ ਸਟੇਟਰ ਵਿੰਡਿੰਗਸ ਕਿਵੇਂ ਜੁੜੇ ਹੋਏ ਹਨ (ਰੋਟਰ ਨੂੰ ਇੱਕ ਕਾਲਪਨਿਕ ਦੋ-ਪੋਲ ਚੁੰਬਕ ਵਜੋਂ ਨਹੀਂ ਦਿਖਾਇਆ ਗਿਆ ਹੈ), ਅਤੇ ਤਿੰਨ ਵਿੰਡਿੰਗਸ ਕੇਂਦਰੀ ਕੁਨੈਕਸ਼ਨ ਪੁਆਇੰਟ ਦੁਆਰਾ ਇੱਕ "Y" ਆਕਾਰ ਵਿੱਚ ਇੱਕਠੇ ਜੁੜੇ ਹੋਏ ਹਨ।ਪੂਰੀ ਮੋਟਰ ਤਿੰਨ ਤਾਰਾਂ A, B, C ਵੱਲ ਲੈ ਜਾਂਦੀ ਹੈ। ਜਦੋਂ ਉਹ ਦੋ ਦੋ ਕਰਕੇ ਊਰਜਾਵਾਨ ਹੁੰਦੇ ਹਨ, ਤਾਂ 6 ਕੇਸ ਹੁੰਦੇ ਹਨ, ਅਰਥਾਤ AB, AC, BC, BA, CA, CB।ਨੋਟ ਕਰੋ ਕਿ ਇਹ ਕ੍ਰਮ ਵਿੱਚ ਹੈ.
ਹੁਣ ਮੈਂ ਪਹਿਲੇ ਪੜਾਅ ਨੂੰ ਦੇਖਦਾ ਹਾਂ: AB ਪੜਾਅ ਊਰਜਾਵਾਨ ਹੈ
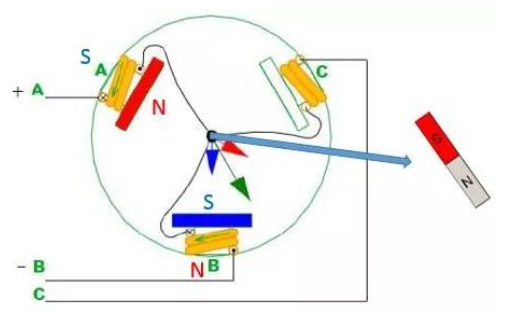
ਜਦੋਂ AB ਪੜਾਅ ਊਰਜਾਵਾਨ ਹੁੰਦਾ ਹੈ, ਤਾਂ A ਪੋਲ ਕੋਇਲ ਦੁਆਰਾ ਉਤਪੰਨ ਚੁੰਬਕੀ ਖੇਤਰ ਰੇਖਾ ਦੀ ਦਿਸ਼ਾ ਲਾਲ ਤੀਰ ਦੁਆਰਾ ਦਿਖਾਈ ਜਾਂਦੀ ਹੈ, ਅਤੇ B ਪੋਲ ਦੁਆਰਾ ਉਤਪੰਨ ਚੁੰਬਕੀ ਖੇਤਰ ਰੇਖਾ ਦੀ ਦਿਸ਼ਾ ਨੀਲੇ ਤੀਰ ਦੁਆਰਾ ਦਿਖਾਈ ਜਾਂਦੀ ਹੈ, ਫਿਰ ਦਿਸ਼ਾ ਨਤੀਜਾ ਬਲ ਦਾ ਹਰੇ ਤੀਰ ਦੁਆਰਾ ਦਿਖਾਇਆ ਗਿਆ ਹੈ, ਫਿਰ ਇਹ ਮੰਨਦੇ ਹੋਏ ਕਿ ਇੱਕ ਦੋ-ਧਰੁਵੀ ਚੁੰਬਕ ਹੈ, ਐਨ-ਪੋਲ ਦੀ ਦਿਸ਼ਾ ਹਰੇ ਤੀਰ ਦੁਆਰਾ ਦਿਖਾਈ ਗਈ ਦਿਸ਼ਾ ਦੇ ਨਾਲ ਮੇਲ ਖਾਂਦੀ ਹੈ "ਵਿਚਕਾਰ ਵਿੱਚ ਰੋਟਰ ਰੱਖਣ ਦੀ ਕੋਸ਼ਿਸ਼ ਕਰੇਗਾ। ਇਸ ਦੀਆਂ ਅੰਦਰੂਨੀ ਚੁੰਬਕੀ ਖੇਤਰ ਰੇਖਾਵਾਂ ਦੀ ਦਿਸ਼ਾ ਬਾਹਰੀ ਚੁੰਬਕੀ ਖੇਤਰ ਰੇਖਾਵਾਂ ਦੀ ਦਿਸ਼ਾ ਦੇ ਨਾਲ ਇਕਸਾਰ ਹੁੰਦੀ ਹੈ।ਸੀ ਦੇ ਤੌਰ 'ਤੇ, ਉਸ ਦਾ ਫਿਲਹਾਲ ਉਸ ਨਾਲ ਕੋਈ ਲੈਣਾ-ਦੇਣਾ ਨਹੀਂ ਹੈ।
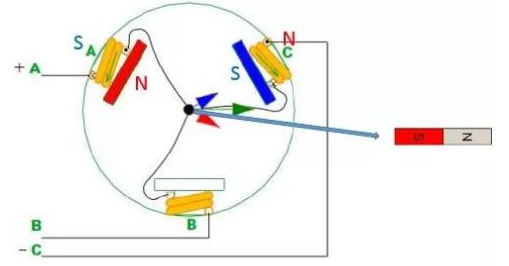
ਪੜਾਅ 2: AC ਪੜਾਅ ਊਰਜਾਵਾਨ
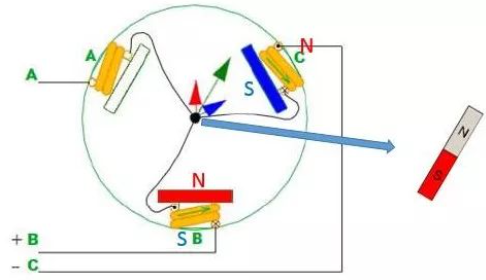
ਤੀਜਾ ਪੜਾਅ: ਬੀ.ਸੀ. ਪੜਾਅ ਦਾ ਬਿਜਲੀਕਰਨ
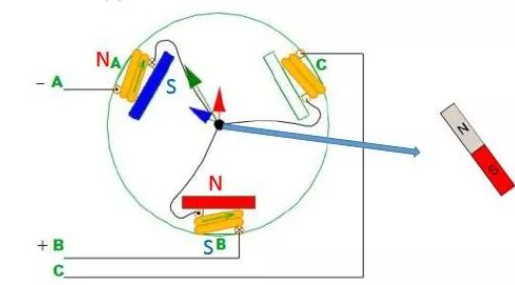
ਤੀਜਾ ਪੜਾਅ: BA ਪੜਾਅ ਊਰਜਾਵਾਨ ਹੁੰਦਾ ਹੈ
ਹੇਠ ਲਿਖੇ ਵਿਚਕਾਰਲੇ ਚੁੰਬਕ (ਰੋਟਰ) ਦਾ ਰਾਜ ਚਿੱਤਰ ਹੈ: ਹਰੇਕ ਪ੍ਰਕਿਰਿਆ ਰੋਟਰ 60 ਡਿਗਰੀ ਘੁੰਮਦਾ ਹੈ

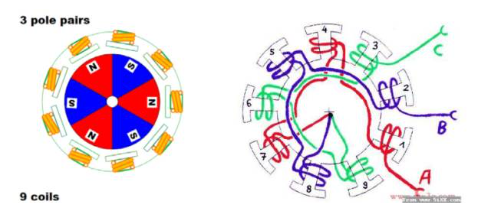
ਸੰਪੂਰਨ ਰੋਟੇਸ਼ਨ ਛੇ ਪ੍ਰਕਿਰਿਆਵਾਂ ਵਿੱਚ ਪੂਰਾ ਹੁੰਦਾ ਹੈ, ਜਿਨ੍ਹਾਂ ਵਿੱਚੋਂ ਛੇ ਕਮਿਊਟੇਸ਼ਨ ਕੀਤੇ ਜਾਂਦੇ ਹਨ।ਤੀਜਾ ਭਾਗ: ਥ੍ਰੀ-ਫੇਜ਼ ਮਲਟੀ-ਵਾਇੰਡਿੰਗ ਮਲਟੀ-ਪੋਲ ਇਨਰ ਰੋਟਰ ਮੋਟਰ ਆਉ ਇੱਕ ਹੋਰ ਗੁੰਝਲਦਾਰ ਬਿੰਦੂ ਨੂੰ ਵੇਖੀਏ।ਚਿੱਤਰ (a) ਇੱਕ ਤਿੰਨ-ਪੜਾਅ ਨੌ-ਵਿੰਡਿੰਗ ਛੇ-ਪੋਲ (ਥ੍ਰੀ-ਫੇਜ਼, ਨੌ-ਵਾਈਡਿੰਗ, ਛੇ-ਪੋਲ) ਮੋਟਰ ਹੈ।ਉਲਟ ਖੰਭੇ) ਅੰਦਰੂਨੀ ਰੋਟਰ ਮੋਟਰ, ਇਸਦਾ ਵਿੰਡਿੰਗ ਕੁਨੈਕਸ਼ਨ ਚਿੱਤਰ (ਬੀ) ਵਿੱਚ ਦਿਖਾਇਆ ਗਿਆ ਹੈ।ਇਹ ਚਿੱਤਰ (b) ਤੋਂ ਦੇਖਿਆ ਜਾ ਸਕਦਾ ਹੈ ਕਿ ਤਿੰਨ-ਪੜਾਅ ਵਾਲੇ ਵਿੰਡਿੰਗ ਵੀ ਵਿਚਕਾਰਲੇ ਬਿੰਦੂ 'ਤੇ ਇਕੱਠੇ ਜੁੜੇ ਹੋਏ ਹਨ, ਜੋ ਕਿ ਇੱਕ ਤਾਰਾ ਕੁਨੈਕਸ਼ਨ ਵੀ ਹੈ।ਆਮ ਤੌਰ 'ਤੇ, ਮੋਟਰ ਦੀਆਂ ਵਿੰਡਿੰਗਾਂ ਦੀ ਸੰਖਿਆ ਸਥਾਈ ਚੁੰਬਕੀ ਖੰਭਿਆਂ ਦੀ ਸੰਖਿਆ ਦੇ ਨਾਲ ਅਸੰਗਤ ਹੈ (ਉਦਾਹਰਨ ਲਈ, 6 ਵਿੰਡਿੰਗਾਂ ਅਤੇ 6 ਖੰਭਿਆਂ ਦੀ ਬਜਾਏ 9 ਵਿੰਡਿੰਗ ਅਤੇ 6 ਖੰਭਿਆਂ ਦੀ ਵਰਤੋਂ ਕੀਤੀ ਜਾਂਦੀ ਹੈ), ਤਾਂ ਜੋ ਸਟੈਟਰ ਦੇ ਦੰਦਾਂ ਨੂੰ ਰੋਕਿਆ ਜਾ ਸਕੇ ਅਤੇ ਰੋਟਰ ਦੇ ਚੁੰਬਕ ਨੂੰ ਖਿੱਚਣ ਅਤੇ ਇਕਸਾਰ ਕਰਨ ਤੋਂ।
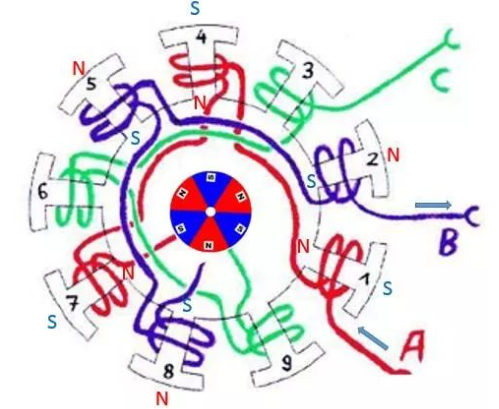
ਇਸਦੀ ਗਤੀ ਦਾ ਸਿਧਾਂਤ ਇਹ ਹੈ: ਰੋਟਰ ਦੇ N ਪੋਲ ਅਤੇ ਐਨਰਜੀਡ ਵਿੰਡਿੰਗ ਦੇ S ਪੋਲ ਵਿੱਚ ਇਕਸਾਰ ਹੋਣ ਦੀ ਪ੍ਰਵਿਰਤੀ ਹੁੰਦੀ ਹੈ, ਅਤੇ ਰੋਟਰ ਦੇ S ਪੋਲ ਅਤੇ ਐਨਰਜੀਡ ਵਿੰਡਿੰਗ ਦੇ N ਪੋਲ ਵਿੱਚ ਇਕਸਾਰ ਹੋਣ ਦੀ ਪ੍ਰਵਿਰਤੀ ਹੁੰਦੀ ਹੈ।ਯਾਨੀ S ਅਤੇ N ਇੱਕ ਦੂਜੇ ਨੂੰ ਆਕਰਸ਼ਿਤ ਕਰਦੇ ਹਨ।ਨੋਟ ਕਰੋ ਕਿ ਇਹ ਪਿਛਲੀ ਵਿਸ਼ਲੇਸ਼ਣ ਵਿਧੀ ਤੋਂ ਵੱਖਰਾ ਹੈ।ਖੈਰ, ਆਓ ਇਸਨੂੰ ਦੁਬਾਰਾ ਵਿਸ਼ਲੇਸ਼ਣ ਕਰਨ ਵਿੱਚ ਤੁਹਾਡੀ ਮਦਦ ਕਰੀਏ।ਪਹਿਲਾ ਪੜਾਅ: AB ਪੜਾਅ ਇਲੈਕਟ੍ਰੀਫਾਈਡ ਹੁੰਦਾ ਹੈ
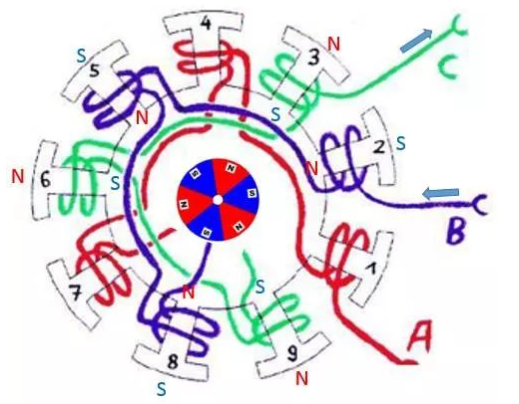
ਪੜਾਅ 2: AC ਪੜਾਅ ਊਰਜਾਵਾਨ

ਤੀਜਾ ਪੜਾਅ: ਬੀ.ਸੀ. ਪੜਾਅ ਦਾ ਬਿਜਲੀਕਰਨ
ਪੋਸਟ ਟਾਈਮ: ਅਕਤੂਬਰ-21-2022